
I'm a recent graduate of MIT, where I did my B.S. in Electrical Engineering and Computer Science ('25). I worked with Alan Yu, Adam Rashid, Zhutian Yang, Leslie Kaelbling, Tomas Lozano-Perez, Ge Yang, and Phillip Isola at CSAIL on hierarchical long-horizon manipulation, imitation learning in VR, and sim-to-real transfer with synthetic imagery. In high school, I was primarily interested in chemistry and an avid participant in the US National Chemistry Olympiad, culminating in a gold medal at the 2019 International Chemistry Olympiad. I'm interested in embodied intelligence and AI. In my free time, I enjoy playing tennis, lifting, and sailing.
Research
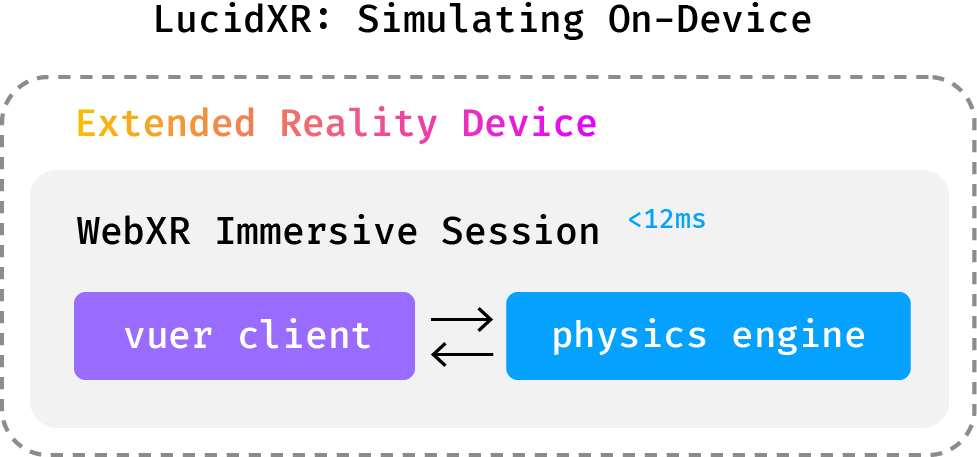
Lucid-XR: An Extended-Reality Data Engine for Robotic Manipulation
Conference on Robot Learning (CoRL), 2025
We build an intuitive VR data collection interface in simulation for imitation learning, producing visual policies from synthetic data that generalize to real-world scenes and amplify data collection capacity 20x.
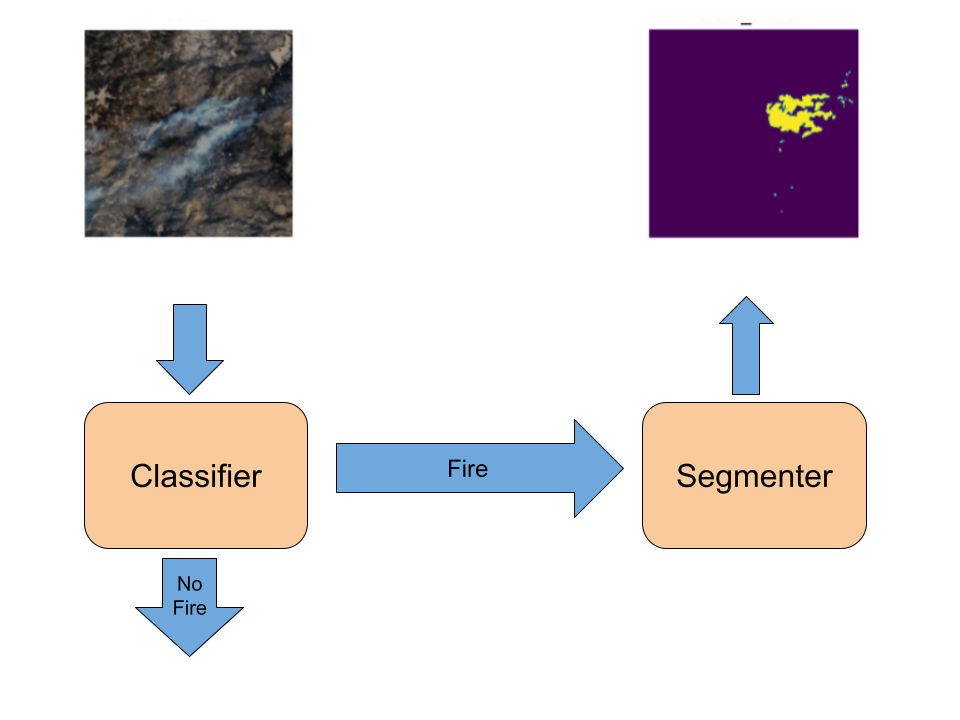
Real-Time Wildfire Localization on the NASA AMS using Deep Learning
AIAA SciTech 2026
Real-time wildfire detection using multi-spectral NASA imagery. Deep learning model achieves 94.68% accuracy and 84.96% IoU for automated localization through clouds and at night.
The Neverwhere Visual Parkour Benchmark Suite
Under Review for CVPR 2026
A comprehensive benchmark suite for evaluating visual parkour capabilities in robotic systems, providing standardized tasks and metrics for testing dynamic locomotion in challenging environments.

PoPi: Combining Planning and Diffusion for Mobility with Unknown Dynamics
arXiv preprint
Planner-Ordered Policy (PoPi) is an approach for long-horizon robot manipulation problems in which the dynamics are partially unknown, for example, pushing and pulling a 5-wheeled office chair.

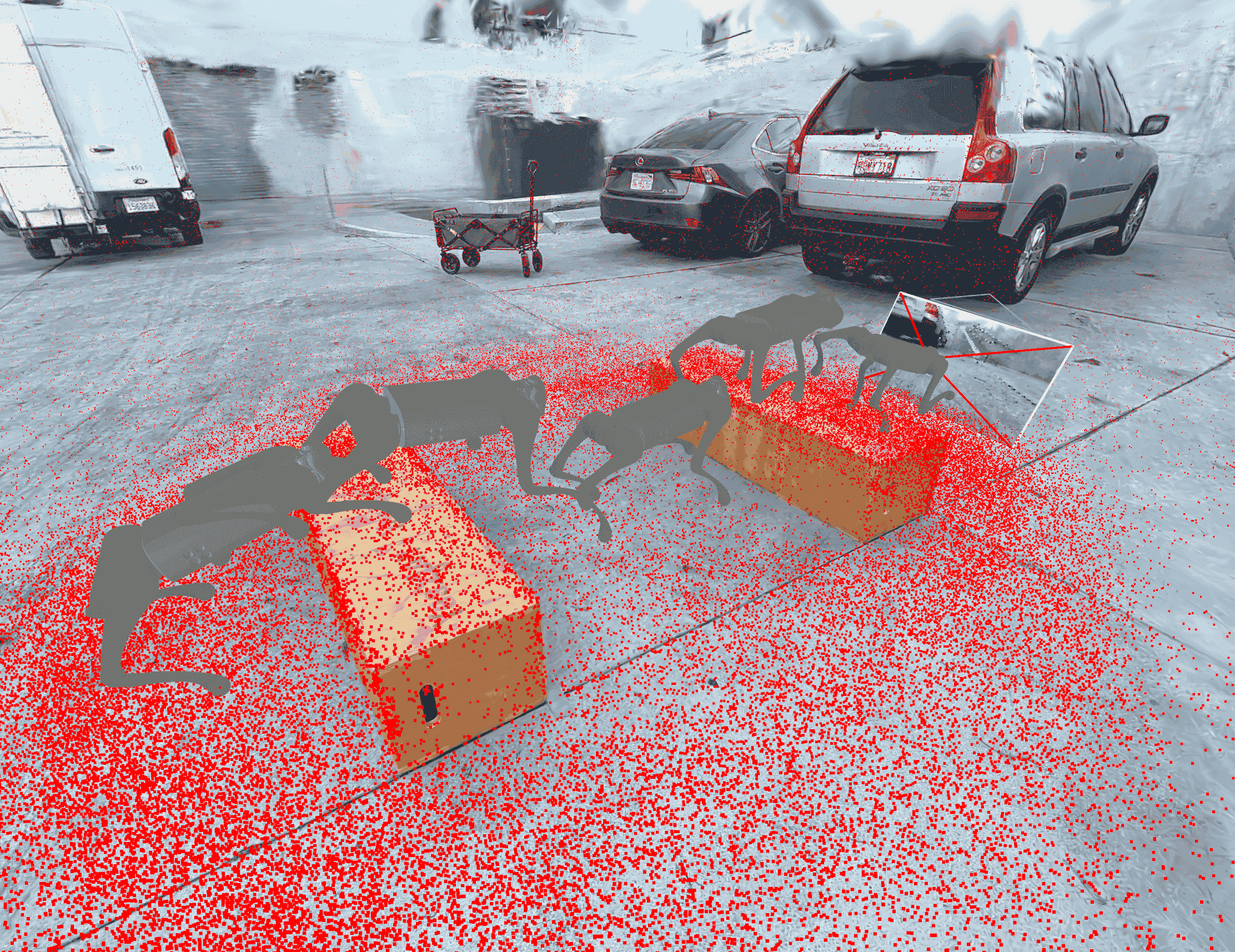
LucidSim: Learning Visual Parkour from Generated Images
Conference on Robot Learning (CoRL), 2024
We use generative models as a realistic and diverse data source by augmenting classical physics simulators. We demonstrate that robots trained this way can accomplish highly dynamic tasks like parkour without requiring depth.
Projects

MITScript
Built an interpreter for MITScript, a custom programming language, from scratch. Implemented a lexer using ANTLR4 and a hand-written recursive descent parser. Developed a bytecode compiler targeting a custom virtual machine, implemented mark-and-sweep garbage collection, and optimized the VM for performance in a class-wide competition.
Resume
Education
Massachusetts Institute of Technology (MIT)
M.Eng in Electrical Engineering and Computer Science
(on-leave) | GPA: 5.0/5.0
B.Sc. in Electrical Engineering and Computer Science
GPA: 5.0/5.0
Sep 2021 - Jun 2025
View Coursework
Computer Architecture
Reinforcement Learning
Controls
Algorithms
Computer Vision
Reasoning/Inference in AI
Statistical Inference
Machine Learning
Robotic Manipulation
Awards
Gold Medal at 2019 International Chemistry Olympiad (IChO) — 1st in the US, 19th in the world
2020 USA Math Olympiad Qualifier and 2019 USA Junior Math Olympiad Qualifier — Top 500 in the US
Experience
Jun 2025 - Dec 2025
Technical Staff
• Spin-off startup focused on robotics research and building the Vuer tool suite and data hub for robotics
◦ Deployed Redis-based task queue into AWS and in-house workstations
◦ Setup 20 computer in-house cluster with SLURM and Ansible
◦ Deployed Redis-based task queue into AWS and in-house workstations
◦ Setup 20 computer in-house cluster with SLURM and Ansible
Isola Lab, CSAIL, MIT
Jan 2024 - Present
Undergraduate Researcher
• Built LucidXR, a VR data engine for robot imitation learning.
◦ Compiled MuJoCo to WebAssembly for in-browser physics simulation; developed visualization in ThreeJS.
◦ Trained VAE and diffusion policies (transformer/UNet) including dexterous hand and deformable object tasks.
◦ Developed keypoint trajectory augmentation (10x data amplification) and depth-aligned synthetic imagery with StableDiffusion.
◦ Achieved zero-shot sim-to-real transfer on pick-and-place.
◦ Co-first author publication in CoRL 2025.
◦ Compiled MuJoCo to WebAssembly for in-browser physics simulation; developed visualization in ThreeJS.
◦ Trained VAE and diffusion policies (transformer/UNet) including dexterous hand and deformable object tasks.
◦ Developed keypoint trajectory augmentation (10x data amplification) and depth-aligned synthetic imagery with StableDiffusion.
◦ Achieved zero-shot sim-to-real transfer on pick-and-place.
◦ Co-first author publication in CoRL 2025.
Learning and Intelligent Systems Group, CSAIL, MIT
Aug 2023 - Dec 2023
Undergraduate Researcher
• Built PoPi, a hierarchical system for long-horizon mobile manipulation with unknown dynamics.
◦ Developed demonstration pipeline for Boston Dynamics Spot
◦ Trained state-based conditional UNet diffusion policy for short-horizon control demonstrating control within 2m.
◦ Implemented SE(2) motion planning from scratch for waypoint generation. Achieved 80% success on chair rearrangement (vs. 0% pure learning, 50% pure planning).
◦ Developed demonstration pipeline for Boston Dynamics Spot
◦ Trained state-based conditional UNet diffusion policy for short-horizon control demonstrating control within 2m.
◦ Implemented SE(2) motion planning from scratch for waypoint generation. Achieved 80% success on chair rearrangement (vs. 0% pure learning, 50% pure planning).
NASA
Jun 2023 - Dec 2023
Computer Vision Research Intern
• Built real-time wildfire detection system on multispectral satellite imagery (IR + thermal). Processed raw sensor data and trained UNet segmentation models. First-author paper, AIAA SciTech 2026.